مشخصات
| حالت | آببندی سه طرفه، هفت سروو موتور، چهار تغذیه، سروو موتور اصلی دستگاه، برش دوتایی متحرک. با دستگاه اولتراسونیک. |
| مواد اولیه | BOPP، CPP، PET، نایلون، فیلم لمینت پلاستیکی، فیلم دمشی اکستروژن چند لایه، آلومینیوم خالص، فیلم لمینت با آبکاری آلومینیوم، فیلم لمینت کاغذی-پلاستیکی |
| حداکثر سرعت ساخت کیسه | ۱۸۰ بار در دقیقه |
| سرعت عادی | ۱۲۰ بار در دقیقه (سه طرف آببند ۱۰۰-۲۰۰ میلیمتر) |
| ۴- حداکثر سرعت خط تغذیه مواد خروجی | ≤35 متر در دقیقه |
| اندازه کیف | |
| عرض | ۸۰-۵۸۰ میلیمتر |
| طول | ۸۰-۵۰۰ میلیمتر (عملکرد تحویل دوگانه) |
| عرض آب بندی | ۶-۶۰ میلیمتر |
| سبک کیف | کیسه آب بندی سه طرفه، کیسه ایستاده، کیسه زیپ دار و آب بندی چهار طرفه |
| اندازه رول مواد | قطر ۶۰۰ * ۱۲۵۰ میلیمتر |
| دقت موقعیت یابی | ≤±1 میلیمتر |
| چاقوی آب بندی حرارتی عدد | چهار تیم روی آببندی حرارتی عمودی، چهار تیم روی سیستم خنککننده عمودی. دو تیم روی چاقوهای آببندی حرارتی زیپدار، دو تیم روی واحدهای خنککننده. سه تیم روی آببندی حرارتی افقی، دو تیم روی سیستم خنککننده افقی |
| مقدار کنترل دما | ۲۲ مسیر |
| محدوده تنظیم کنترل دما | طبیعی و تا 360℃ |
| قدرت کل دستگاه | ۴۵ کیلووات |
| ابعاد کلی (طول*عرض*ارتفاع) | ۱۴۱۰۰*۱۷۵۰*۱۹۰۰ |
| وزن خالص کل دستگاه | حدود ۶۵۰۰ کیلوگرم |
| رنگ | بدنه اصلی دستگاه مشکی و پوشش آن سفید شیری است. |
| نویز≤75db | |
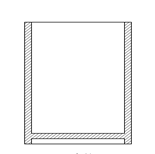
آب بندی سه طرفه
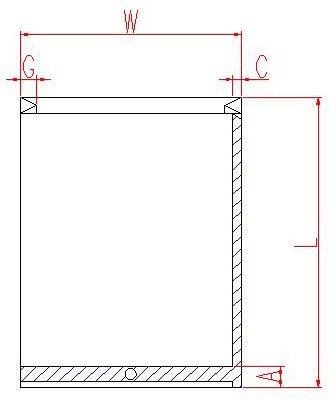
آب بندی چهار طرفه
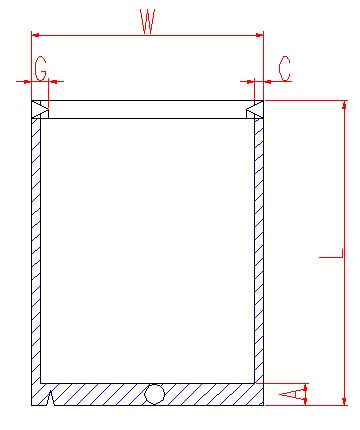
آب بندی چهار طرفه
کیسه ایستاده
کیف ایستاده با زیپ
مشخصات و پارامترهای مربوطه
| دستگاه قاب باز کردن | |
| ساختار | ساختار باز کردن پیچ که به صورت خودکار خطای عمودی را اصلاح میکند |
| کنترل تنش | |
| ترمز قدرت مغناطیسی | |
| ساختار ابتکاری تغذیه با آب | |
| حالت کنترل | غلتک رقصان از نوع شناور که حسگر جابجایی آن سرعت تغذیه خروجی را کنترل میکند |
| غلتک تغذیه مخروطی شکل محکم و ثابت (با شفت منبسط شونده هوا) | |
| کنترل اصلاح خطا (EPC) | |
| ساختار | تنظیم ثانویه میله پیچ، بلند کردن و افتادن عمودی قفسه K |
| رانندگی | رله حالت جامد موتور سنکرون با سرعت پایین را راه اندازی می کند |
| انتقال | اتصال کوپلینگ شفت فولادی |
| نوع کنترل | تشخیص مبدل الکتریکی بازتاب، کنترل مستقل. |
| دقت ردیابی | 0.5 میلیمتر |
| محدوده تنظیم | ۱۵۰ میلیمتر |
| قطعات روبروی بالا و پایین | |
| ساختار | ساختار پرس فنری تک سر غلتک |
| تنظیم | تنظیم دستی |
| دستگاه آب بندی عمودی | |
| ساختار | پرسکاری آهن با نمایشگر عمودی، ساختار پرسکاری فنری مجموعه خنککننده |
| رانندگی | دستگاه اصلی میله اتصال مکانیزم خارج از مرکز را برای انجام حرکت عمودی هدایت میکند. |
| مقدار | ۴ تیم در زمینه آببندی حرارتی، ۴ تیم در زمینه خنکسازی |
| طول | ۷۰۰ میلیمتر |
| دستگاه زیپ عمودی B | |
| ساختار | اتوکشی عمودی با نمایشگر، ساختار فنری پرس مجموعه خنککننده، تیغه آببندی پایین؛ نگهدارنده اتو حرارتی پنوماتیک هنگام توقف دستگاه به سمت پایین حرکت میکند. تنظیم مجدد خودکار هنگام شروع به کار دستگاه. |
| رانندگی | دستگاه اصلی میله اتصال مکانیزم خارج از مرکز را برای انجام حرکت عمودی هدایت میکند. |
| مقدار | ۲ تیم در زمینه آببندی حرارتی، ۲ تیم در زمینه خنکسازی |
| دستگاه آب بندی افقی | |
| ساختار | سازه فنری مجموعه پرس آهنی با نمایشگر افقی، مجموعه خنککننده |
| رانندگی | دستگاه اصلی میله اتصال مکانیزم خارج از مرکز را برای انجام حرکت عمودی هدایت میکند. |
| مقدار | سه تیم در زمینه آببندی حرارتی، دو تیم در زمینه خنکسازی |
| طول | ۶۴۰ میلیمتر |
| ب) دستگاه صاف کردن افقی (لبه زیپ را با حرارت صاف کنید) | |
| ساختار | سازه فنری مجموعه پرس آهن با نمایشگر افقی |
| رانندگی | همانند آببندی افقی |
| مقدار | ۲ ست پرس حرارتی |
| دستگاه تغذیه فیلم | |
| ساختار | غلتک لاستیکی پرس از نوع اصطکاکی |
| رانندگی | سروومکانیسم تولید رواناب کاملاً دیجیتال وارداتی (پاناسونیک، ژاپن) |
| انتقال | باند و چرخ همزمان |
| حالت کنترل | کنترل PLC متمرکز، تنظیم طول همزمان و کنترل کشش میانی |
| تنش مرکزی | |
| ساختار | ساختار غلتک کششی شناور |
| حالت کنترل | کنترل PLC متمرکز |
| مکانیسم کنترل | روند مکمل حرکت غلتک کششی شناور، طول گام سروو مرکزی را کنترل میکند تا همزمان به توقف و شروع دست یابد. |
| حالت تست | سوئیچ رویکردهای الکترومغناطیس (NPN) |
| محدوده تنظیم تنش | 0.1-0.2 میلیمتر (تنظیمات کامپیوتری، جبران خودکار) |
| دستگاه انتقال اصلی | |
| ساختار | ساختار میله کوپلینگ کششی و فشاری میل لنگ |
| رانندگی | سروو موتور پاناسونیک 3 کیلووات |
| انتقال | گیربکس اصلی ماشین آلات الکتریکی باند 1:10 کاهنده |
| روش کنترل | کنترل PLC متمرکز |
| حالت دویدن | موتور اصلی که قاب را برای انجام حرکت عمودی هدایت میکند |
| دستگاه موقعیت یابی خودکار | |
| حالت تست | آزمایش ردیابی حسگر فوتوالکتریک بازتابی |
| دقت آزمایش | 0.01-0.25 میلیمتر |
| دقت موقعیتیابی یکپارچه | ≤0.5-1 میلیمتر |
| محدوده جستجوی فوتوالکتریک | ±3 میلیمتر |
| محدوده اکولایزر یکسوکننده | ±3 میلیمتر |
| اصلاح موقعیت عاقلانه | سیستم اصلاح حرکت خودکار فوتوالکتریک، آهنگهای سروو برای تنظیم جریان |
| تنظیم کنترل دما | |
| حالت تست | تست کوپل حرارتی |
| حالت کنترل | کنترل PLC متمرکز، تنظیم PID، رله حالت جامد |
| محدوده تنظیم دما | طبیعی -360℃ |
| نقطه آزمایش دما | قسمت مرکزی با گرمایش الکتریکی |
| چاقوی برش دوتایی (برش دوتایی متحرک) | |
| ساختار | چاقوی برش از بالا + تجهیزات تنظیم + چاقوی برش از پایین ثابت |
| حالت | چاقوی برشی فنری |
| انتقال | موتور محرک اصلی، مکانیزم خارج از مرکز برای حرکت به بالا و پایین. |
| تنظیم | حرکت افقی (دو انتها) |
| دستگاه کیسه ایستاده |
| سیستم باز کردن خودکار و همزمان، تنظیم رایگان کشش باز کردن، تاشو لبه سه پایه. |
| دستگاه کیسهزنی خودکار سوراخهای گرد و موقعیتیابی دقیق. |
| دستگاه باز کردن زیپ به صورت خودکار |
| گیربکس تک سرعته مستقل برای باز کردن و کاهش تغذیه موتور |
| تنظیم خودکار فوتوالکتریک که سرعت همزمان با موتور اصلی را تضمین میکند |
| دستگاه پانچ (با قطعات وارداتی سازگار است) | |
| ساختار | موتور پنوماتیکی تکیهگاه خمیده، مدل اصلی پیشرو با ساختار ضربهگیر |
| حالت کنترل | کنترل PLC متمرکز |
| رانندگی | رله حالت جامد مقدار سلونوئید را درایو میکند |
| تعداد پایه پانچ | دو تیم پایه (لوزی) |
| سیلندر هوا | ایرتک، تایوان |
| دستگاه چاقوی جوشکاری | |
| افقی: | ۲۰ میلیمتر * ۲ رادیکس؛ ۳۰ میلیمتر * ۲ رادیکس؛ ۴۰ میلیمتر * ۲ رادیکس؛ ۵۰ میلیمتر * ۲ رادیکس |
| عقب بردن لبه | |
| منبع تغذیه | سه فاز ۳۸۰ ولت، ±۱۰٪، ۵۰ هرتز، پنج خط |
| حجم | ۴۵ کیلووات |
| تامین هوا | فشار ≥ 0.6 مگاپاسکال |
| آب خنک کننده | ۳ لیتر در دقیقه |